Products
Ku-band and the X-band airborne SAR systems, RIAN-SAR-Ku and RIAN-SAR-X, have been developed and produced at the Institute of Radio Astronomy. The systems are designed to be operated from small aircrafts.
 Fig. 1. RIAN-SAR-Ku system onboard Antonov AN-2 aircraft.
Fig. 1. RIAN-SAR-Ku system onboard Antonov AN-2 aircraft.  Fig. 2. RIAN-SAR-Ku system onboard Y-12 aircraft.
Fig. 2. RIAN-SAR-Ku system onboard Y-12 aircraft.
Features of RIAN-SAR-Ku System
The Ku-band SAR system (RIAN-SAR-Ku) operates in a strip-map mode producing single-look SAR images of 3-meter resolution in real time. The radar can perform measurements at two linear polarizations. The system is also capable of detection and indication of moving targets.
- The transmitter is based on a traveling-wave tube power amplifier (TWT PA).
- The binary phase coding technique (M-sequences) is used for pulse compression.
- High pulse repetition frequency (PRF) of 20 kHz is used for detection of moving targets.
- The PRF is adjusted continuously to keep the ratio of the aircraft velocity to the PRF constant.
- A slotted-waveguide dual-polarization antenna with 1-degree beam and an alternative horn antenna with 7-degree beam are used.
- The antenna orientation angles are estimated with a high accuracy directly from Doppler frequencies of backscattered radar signals.
- Real-time SAR processing is performed with a time-domain convolution-based algorithm.
- The radar system is able to record range-compressed radar data, as well as pre-filtered data, navigation data, and SAR images.
Features of RIAN-SAR-X System
The recently developed X-band SAR system is capable of producing high-quality multi-look SAR images with 2-meter resolution in real time. The system is designed to be operated from light-weight aircraft platforms in side-looking or squinted strip-map modes.
- The transmitter is based on a modern solid-state power amplifier (SSPA).
- The radar transmits long pulses with a linear frequency modulation.
- A direct digital synthesizer (DDS) provides frequency sweeping.
- A digital receiver technique has been implemented.
- The radar uses a compact slotted-waveguide antenna with 10-degree beam.
- The antenna orientation angles are estimated with a high accuracy directly from Doppler frequencies of backscattered radar signals.
- SAR processing is performed by using a frame-based range-Doppler algorithm with a real-time motion compensation.
- Real-time multi-look processing has been implemented in order to reduce speckle noise.
- The SAR system is capable of recording original uncompressed radar data, as well as pre-filtered data, navigation data, and SAR images.
Table 1. Characteristics of the SAR Hardware Systems
| Parameter | RIAN-SAR-Ku | RIAN-SAR-X |
| Transmitter type | TWT PA | SSPA |
| Operating frequency | Ku-band | X-band |
| Transmitted peak power | 100 W | 120 W |
| Pulse repetition frequency (PRF) | 5 - 20 kHz | 3 - 5 kHz |
| Pulse repetition rate | < 200 Hz / (m/s) | Not used |
| Pulse compression technique | Binary phase coding (M-sequences) | Linear frequency modulation |
| Pulse bandwidth | 50 MHz | 100 MHz |
| Pulse duration | 5.12 µs | 5 - 16 µs |
| Receiver type | Analog | Digital |
| Receiver bandwidth | 100 MHz | 100 MHz |
| Receiver noise figure | 2.5 dB | 2.0 dB |
| System losses | 4.0 dB | 1.5 dB |
| ADC sampling frequency | 100 MHz | 200 MHz |
| ADC capacity | 12 bit | 14 bit |
| Antenna type | Slotted-waveguide / Horn | Slotted-waveguide |
| Antenna beam width in azimuth | 1° / 7° | 10° |
| Antenna beam width in elevation | 40° / 40° | 40° |
| Antenna gain | 30 dB / 21 dB | 20 dB |
| Polarization | HH or VV / VV | VV |
| Aircraft flight velocity | 30 - 80 m/s | 30 - 80 m/s |
| Aircraft flight altitude | 1000 - 5000 m | 1000 - 5000 m |
| Aircrafts used | AN-2, Y-12 | AN-2 |
Table 2. Characteristics of the SAR Data Processing Systems
| Parameter | RIAN-SAR-Ku | RIAN-SAR-X |
| Range resolution | 3.0 m | 2.0 m |
| Range sampling interval | 1.5 m | 1.5 m |
| Number of range gates | 1024 | 2048(processed) / 4096(raw) |
| Range swath width | 1536 m | 3072 m |
| SAR processing algorithm | Time-domain convolution | Range-Doppler algorithm |
| Real-time motion error compensation (based on trajectory measurements) | No | Yes, 1st- and 2nd-order MOCO |
| Clutter-lock* | Line-by-line | Frame-by-frame |
| Pre-filtering | Yes | Yes |
| Azimuth resolution | 3.0 m | 2.0 m |
| Number of looks (in real time) | 1 | 1 - 15 |
| Ground mapping of SAR images | Post-processing | In real time |
| Raw data recording | Range-compressed, 7-times decimated | Uncompressed, no decimation |
| Recorded raw data rate | 90 Mbps | 625 Mbps |
| Recording pre-filtered data, navigation data, SAR images, etc. | Yes | Yes |
| Detection and indication of moving targets | Yes | No |
*The antenna beam orientation angles estimated from the backscattered radar data are used to adjust SAR processing algorithms (the pre-filter, migration curves, reference functions, etc.).
Table 3. Detection and Indication of Moving Targets with RIAN-SAR-Ku System
| Unambiguous velocity | -100 m/s ... +100 m/s |
| Velocity estimation accuracy | 0.2 m/s |
| Target position accuracy | 1.5 m in range, 6.0 m in azimuth |
| Ground clutter rejection | > 30 dB |
Examples of SAR Images
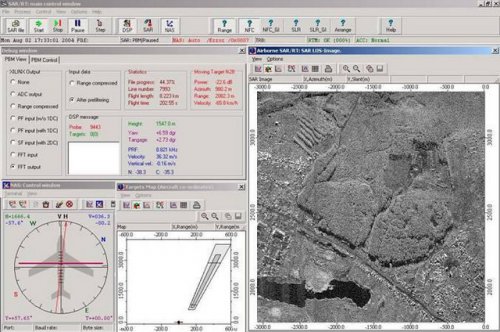 Fig. 3. Screenshot of the RIAN-SAR-Ku radar control display. All motion parameters are indicated, including the position of the antenna footprint on the ground with respect to the aircraft.
Fig. 3. Screenshot of the RIAN-SAR-Ku radar control display. All motion parameters are indicated, including the position of the antenna footprint on the ground with respect to the aircraft. 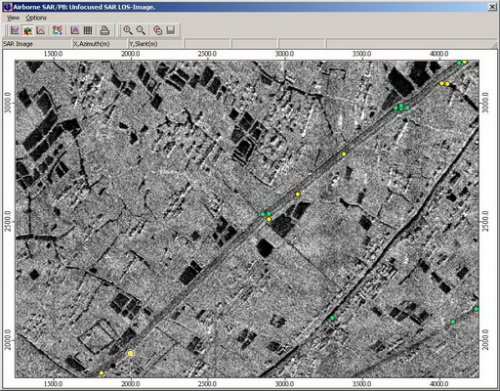 Fig. 4. Real-time SAR image with detected and indicated moving targets obtained by the RIAN-SAR-Ku system.
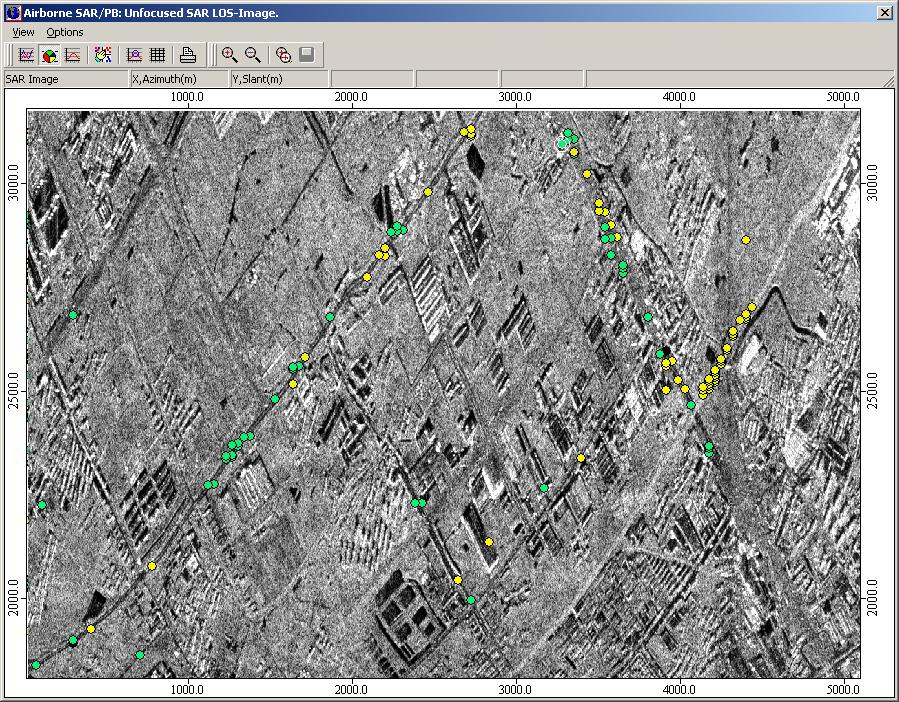
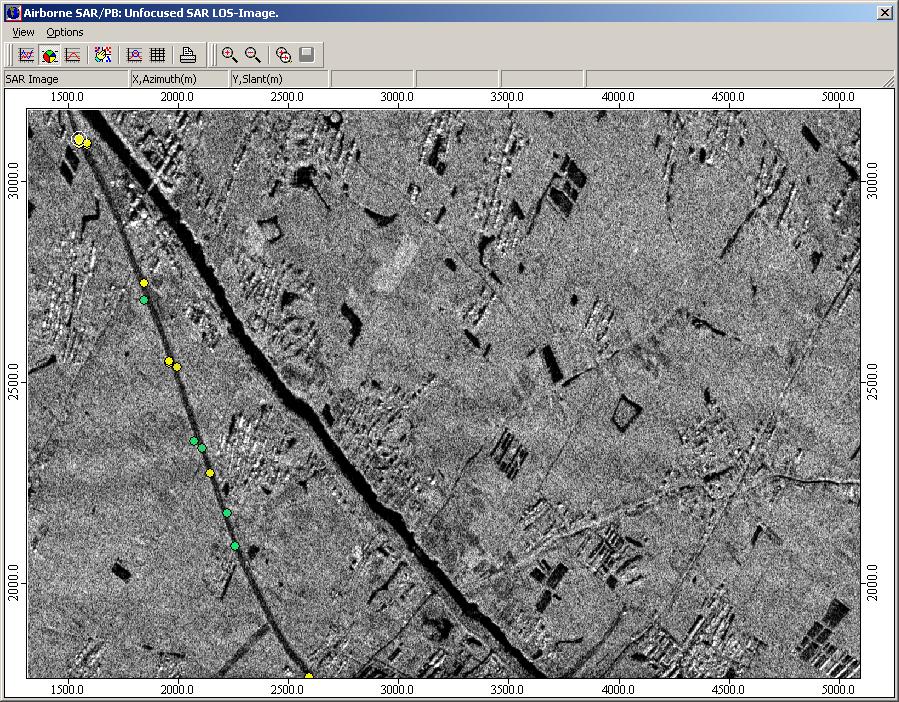
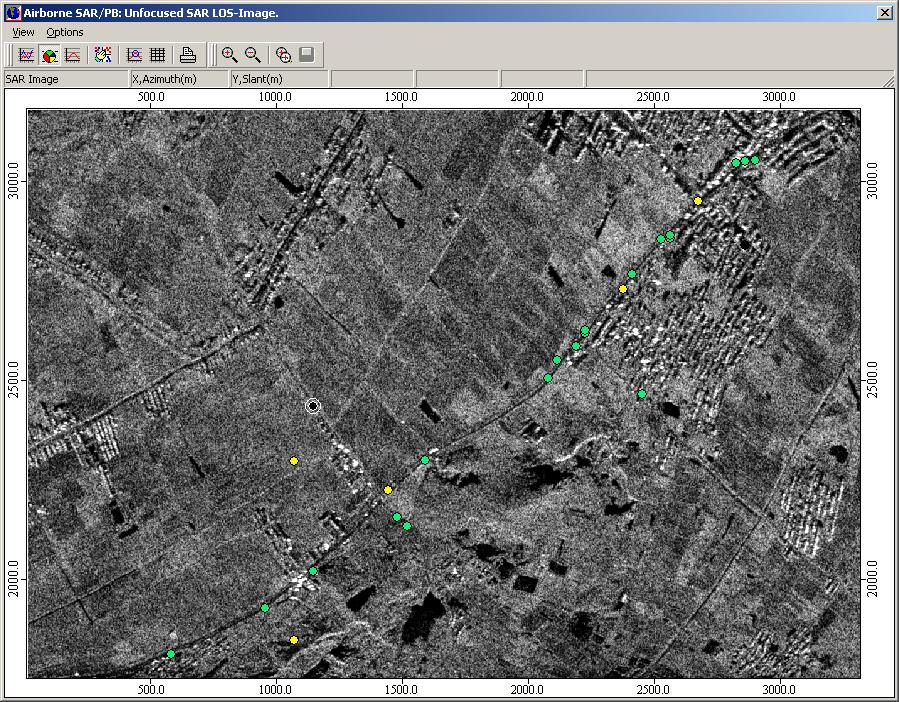
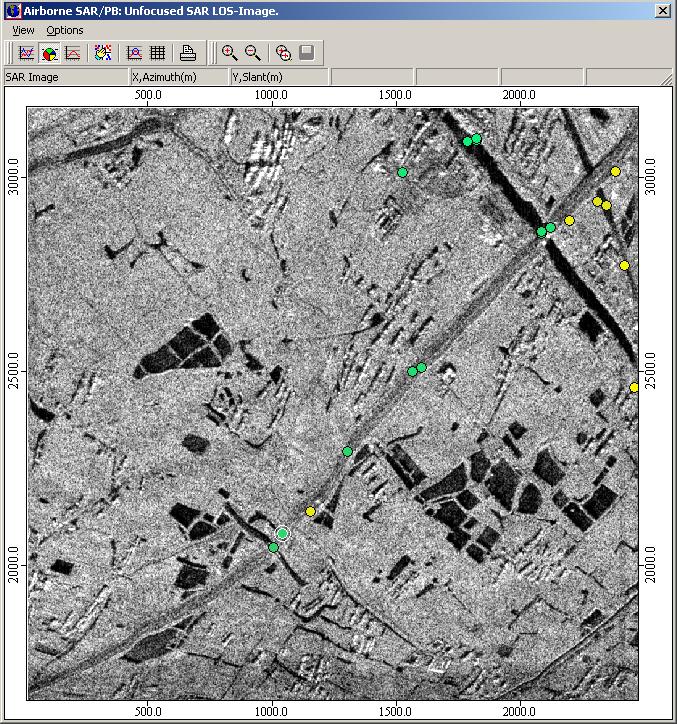
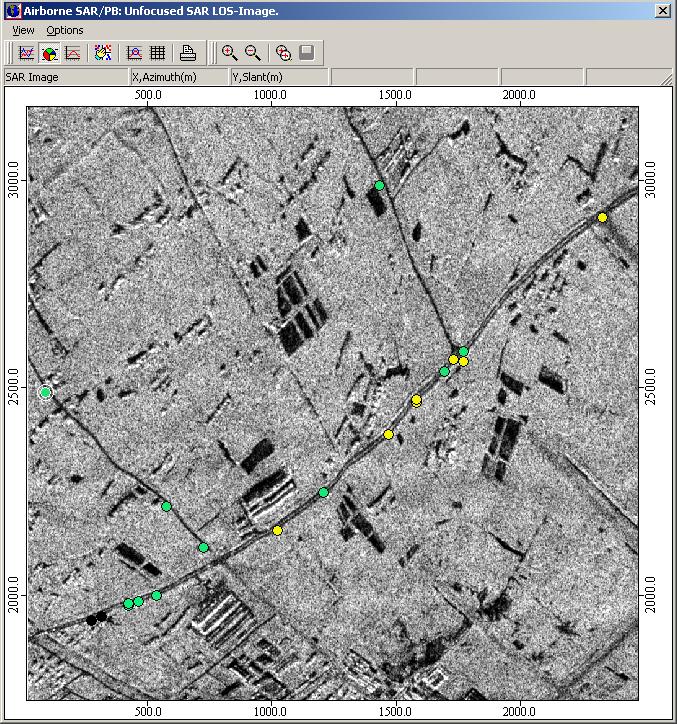
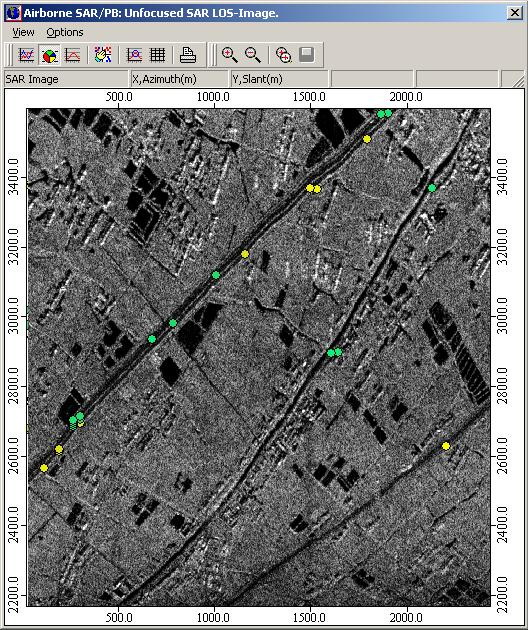
Fig. 4. Real-time SAR image with detected and indicated moving targets obtained by the RIAN-SAR-Ku system.
Other examples: Fig. 4a, Fig. 4b, Fig. 4c, Fig. 4d, Fig. 4e, Fig. 4f, Fig. 4g. These SAR image are built without geometric correction.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 Fig. 5. 45-look SAR image of 3-meter resolution formed by using the algorithm with the built-in geometric correction (at the post-processing stage). The raw data were recorded by the RIAN-SAR-Ku system with the 7-degree horn antenna. The SAR image is imposed on a Google Map image of the scene in order to illustrate the achieved geometric accuracy.
Fig. 5. 45-look SAR image of 3-meter resolution formed by using the algorithm with the built-in geometric correction (at the post-processing stage). The raw data were recorded by the RIAN-SAR-Ku system with the 7-degree horn antenna. The SAR image is imposed on a Google Map image of the scene in order to illustrate the achieved geometric accuracy.  Fig. 6. 7-look SAR image of 2-meter resolution obtained with the RIAN-SAR-X system.
Fig. 6. 7-look SAR image of 2-meter resolution obtained with the RIAN-SAR-X system.
Several SAR image frames were stitched to form this ground strip image. Open the full-resolution image (7.5 Mb). View the illustration of the frame stitching procedure (animated gif, 6.8 Mb).
{kind=link}
{kind=link}